
| Главная » Статьи » Proton PICBasic |
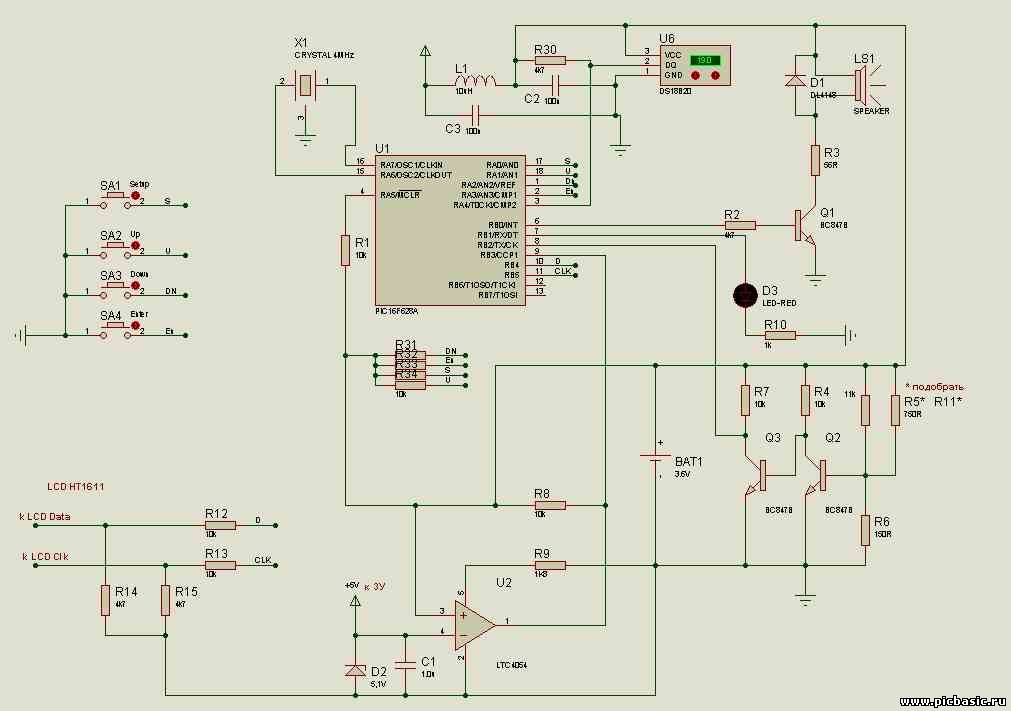
Предлагаю Вашему вниманию – Часы на МК PIC16F628A.
Схема прибора: Исходный код: Code
'-------------------------- Опции компилятора -------------------------------- Declare SHOW_SYSTEM_VARIABLES = OFF ' При симуляции в Proteus не показывать внутренние переменные Declare FSR_CONTEXT_SAVE = OFF ' Не заботиться о сохранении содержимого регистра FSR Declare Reminders = OFF ' Выключить напоминания компилятора Declare Warnings = OFF ' Выключить предупреждения компилятора Declare Optimiser_Level 0 ' Выключить оптимизацию программы ;-------------------------- Общие настройки------------------------------------ Device = 16F628A ' Используемый микроконтроллер Xtal = 4 ' Частота осциллятора 4 МГц '-------------------------- Конфигурация программирования -------------------- Config BODEN_OFF, BOREN_OFF, CP_OFF, DATA_CP_OFF, PWRTE_ON, WDT_OFF, LVP_OFF, MCLRE_ON, XT_OSC '-------------------------- Настройки портов --------------------------------- PortB_Pullups = Off ' Выключить подтягивающие резисторы на PORTB Declare All_Digital = Off ' Каждый порт выполняет свою функцию по умолчанию '-------------------------- OPTION_REG ---------------------------------------- Symbol PS0 = OPTION_REG.0 ' Бит установки предделителя TMR0 Symbol PS1 = OPTION_REG.1 ' Бит установки предделителя TMR0 Symbol PS2 = OPTION_REG.2 ' Бит установки предделителя TMR0 Symbol PSA = OPTION_REG.3 ' Выбор включения предделителя Symbol T0SE = OPTION_REG.4 ' Выбор фронта приращения TMR0 при внешнем тактовом сигнале Symbol T0CS = OPTION_REG.5 ' Выбор тактового сигнала для TMR0 Symbol INTEDG = OPTION_REG.6 ' Выбор активного фронта сигнала на входе внешнего прерывания INT Symbol NOT_RBPU = OPTION_REG.7 ' Включение подтягивающих резисторов на PORTB '-------------------------- INTCON -------------------------------------------- Symbol RBIF = INTCON.0 ' Флаг внешнего прерывания по PORTB.4-PORTB.7 Symbol INTF = INTCON.1 ' Флаг внешнего прерывания по PORTB.0(INT) Symbol T0IF = INTCON.2 ' Флаг переполнения TMR0 Symbol RBIE = INTCON.3 ' Бит разрешения прерывания по PORTB.4-PORTB.7 Symbol INTE = INTCON.4 ' Бит разрешения прерывания по PORTB.0(INT) Symbol T0IE = INTCON.5 ' Бит разрешения прерывания по переполнению TMR0 Symbol PEIE = INTCON.6 ' Бит разрешения прерывания от периферийных устройств Symbol GIE = INTCON.7 ' Бит глобального разрешения прерываний '-------------------------- Определение переменных --------------------------- Dim J As Byte Dim X As Byte Dim I As Byte Dim N As Byte Dim Busy As Bit ' Busy Status-Bit Dim R_Temp As Word ' RAW Temperature readings Dim Cold_Bit As R_Temp.11 ' Dim Cel As Byte ' Dim Cel_ot As Word ' 'Dim M As Byte ' 'Dim MM As Byte ' Dim Tmp As Byte ' Dim TmpVal As Byte ' Dim TmpVal1 As Byte ' Dim Mass[10] As Byte ' Массив для вывода нужной инф. на экран Dim HRS As Byte ' Часы Dim Mins As Byte ' Минуты Dim Sec As Byte ' Секунды Dim OldSec As Byte ' Dim BIG As Dword ' переменная для счета секунд Dim BIG1 As BIG.HighWord ' Dim Delay As Byte ' Пауза '-----------------Timer 1--------------- 'Dim Time1 As Byte Dim Des1 As Byte Dim Sot1 As Byte Dim Sum1 As Byte Dim Pr1 As Byte Dim T1 As Byte '-----------------Timer 2--------------- 'Dim Time2 As Byte Dim Des2 As Byte Dim Sot2 As Byte Dim Sum2 As Byte Dim Pr_2 As Byte 'Dim T2 As Byte '-----------------Timer 3 Не активен!!!--------------- 'Dim Time2 As Byte Dim Des3 As Byte Dim Sot3 As Byte Dim Sum3 As Byte Dim Pr_3 As Byte '-------------------------- Начало ------------------------------------------- 'TRISB = $00 Symbol Beep = PORTB.0 Symbol Lamp = PORTB.1 Symbol Akk_OK = PORTB.2 Symbol Akk_Low = PORTB.3 Symbol DataPin = PORTB.4 Symbol ClockPin = PORTB.5 Symbol Comm_Pin = PORTA.4 Symbol Setup = PORTA.0 Symbol Up = PORTA.1 Symbol Down = PORTA.2 Symbol Ent = PORTA.3 Clear HRS = 12 Mins = 28 Delay = 100 Mass[2] = $FF Mass[7] = $FF '-------------------------- Настройка TMR0 для прерываний -------------------- OPTION_REG = %10000111 TMR0 = $06 ' Значение регистра TMR0 T0IE = 1 ' Разрешение прерывания при переполнении TMR0 с частотой 15,625000 Гц GIE = 1 ' Разрешение глобального прерывания BIG = 1000000 On_Interrupt GoTo Int_Label GoTo MainProgram '-------------------------- Прерывания-------------------------- Int_Label: Context Save ' If T0IF = 1 Then Dec BIG1 ' Если сработал TMR0, то отнимаем единицу из старшего байта переменной BIG1, OldSec = Sec If BIG < 0 Then BIG = BIG + 1000000 : Inc Sec T0IF = 0 Context Restore ' Возврат из обработчика прерывания '-------------------------- Главная программа ------------------------- MainProgram: While 1 = 1 If Akk_OK = 1 And Akk_Low = 1 Then Low Lamp Else If OldSec = Sec Then High Lamp Else Low Lamp EndIf EndIf If Pr1 = 0 And Pr_2 = 0 Then GoSub Temper Low Beep Else If Pr1 = 1 And Sum1 = 0 Then If Ent = 0 Then Pr1 = 0 : Sum1 = 0 : Low Beep ' Mass[6] = $01 For X = 0 To 1 TmpVal1 = Sum1 Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X If OldSec = Sec Then High Beep DelayMS 5 Else Low Beep DelayMS 5 EndIf EndIf If Pr_2 = 1 And Sum2 = 0 Then If Ent = 0 Then Pr_2 = 0 : Sum2 = 0 : Low Beep For X = 0 To 1 TmpVal1 = Sum2 Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X If OldSec = Sec Then High Beep DelayMS 5 Else Low Beep DelayMS 5 EndIf EndIf EndIf If Mass[6] = 1 And Pr1 = 1 And Ent = 0 Then Pr1 = 0 : Sum1 = 0 : Low Beep : GoSub Temper If Mass[6] = 2 And Pr_2 = 1 And Ent = 0 Then Pr_2 = 0 : Sum2 = 0 : Low Beep : GoSub Temper OldSec = Sec GoSub Tim If Mins = 00 Or Mins = 10 Or Mins = 20 Or Mins = 30 Or Mins = 40 Or Mins = 50 Then GoSub Temper GoSub Conv GoSub Led If Setup = 0 Then DelayMS Delay : J = 1 : GoSub Menu Wend '---------------------------------- Меню ------------------------------------------------------- Menu: Mass[5] = 11 If Up = 0 Then DelayMS Delay : Inc J If J > 4 Then J = 1 If Down = 0 Then DelayMS Delay : Dec J If J < 1 Then J = 4 If J <> 4 Then Mass[7] = $FF : GoSub Tim Select J Case 1 TmpVal1 = J : GoSub Conv : Mass[6] = TmpVal TmpVal1 = Des1 : GoSub Conv : Mass[8] = TmpVal TmpVal1 = Sot1 : GoSub Conv : Mass[9] = TmpVal If Ent = 0 Then DelayMS Delay : GoSub Timer1 Case 2 TmpVal1 = J : GoSub Conv : Mass[6] = TmpVal TmpVal1 = Des2 : GoSub Conv : Mass[8] = TmpVal TmpVal1 = Sot2 : GoSub Conv : Mass[9] = TmpVal If Ent = 0 Then DelayMS Delay : GoSub Timer2 Case 3 TmpVal1 = J : GoSub Conv : Mass[6] = TmpVal TmpVal1 = Des3 : GoSub Conv : Mass[8] = TmpVal TmpVal1 = Sot3 : GoSub Conv : Mass[9] = TmpVal Case 4 Mass[0] = $04 : Mass[1] = $FF : Mass[3] = $FF : Mass[4] = $00 If Ent = 0 Then DelayMS Delay : GoSub Time EndSelect GoSub Led If Setup = 0 Then DelayMS Delay : Mass[5] = 0 : Return GoTo Menu '------------------------------------Timer 1----------------------------------------------- Timer1: If T1 = 0 Then Mass[8] = 0 If Up = 0 Then DelayMS Delay : Inc Des1 If Des1 > 9 Then Des1 = 0 If Down = 0 Then DelayMS Delay : Dec Des1 If Des1 < 0 Then Des1 = 9 Else Mass[9] = 0 If Up = 0 Then DelayMS Delay : Inc Sot1 If Sot1 > 9 Then Sot1 = 0 If Down = 0 Then DelayMS Delay : Dec Sot1 If Sot1 < 0 Then Sot1 = 9 EndIf GoSub Led TmpVal1 = Des1 : GoSub Conv : Mass[8] = TmpVal TmpVal1 = Sot1 : GoSub Conv : Mass[9] = TmpVal Sum1 = Des1 * 10 + Sot1 If Ent = 0 Then DelayMS Delay : Inc T1 If T1 = 2 Then T1 = 0 If Sum1 > 0 Then Pr1 = 1 Else Pr1 = 0 EndIf Des1 = 0 Sot1 = 0 Return EndIf GoSub Led GoTo Timer1 '------------------------------------Timer 2----------------------------------------------- Timer2: If T1 = 0 Then Mass[8] = 0 If Up = 0 Then DelayMS Delay : Inc Des2 If Des2 > 9 Then Des2 = 0 If Down = 0 Then DelayMS Delay : Dec Des2 If Des2 < 0 Then Des2 = 9 Else Mass[9] = 0 If Up = 0 Then DelayMS Delay : Inc Sot2 If Sot2 > 9 Then Sot2 = 0 If Down = 0 Then DelayMS Delay : Dec Sot2 If Sot2 < 0 Then Sot2 = 9 EndIf GoSub Led TmpVal1 = Des2 : GoSub Conv : Mass[8] = TmpVal TmpVal1 = Sot2 : GoSub Conv : Mass[9] = TmpVal Sum2 = Des2 * 10 + Sot2 If Ent = 0 Then DelayMS Delay : Inc T1 If T1 = 2 Then T1 = 0 If Sum2 > 0 Then Pr_2 = 1 Else Pr_2 = 0 EndIf Des2 = 0 Sot2 = 0 Return EndIf GoSub Led GoTo Timer2 '------------------------------------ Установка часов ------------------------------- Time: GoSub Tim If T1 = 0 Then Mass[0] = 0 Mass[1] = 0 If Up = 0 Then DelayMS Delay : Inc HRS If HRS > 23 Then HRS = 0 If Down = 0 Then DelayMS Delay : Dec HRS If HRS < 0 Then HRS = 23 Else Mass[3] = 0 Mass[4] = 0 If Up = 0 Then DelayMS Delay : Inc Mins If Mins > 59 Then Mins = 0 If Down = 0 Then DelayMS Delay : Dec Mins If Mins < 0 Then Mins = 59 EndIf GoSub Led If Ent = 0 Then DelayMS Delay : Inc T1 If T1 = 2 Then T1 = 0 Return EndIf GoSub Tim GoSub Led GoTo Time '------------------------- Обработка событий ------------------------------------------------------------ Tim: If Sec > 59 Then ' Если прошло 60 сек Sec = 0 Inc Mins Dec Sum1 Dec Sum2 If Sum1 < 0 Then Sum1 = 0 If Sum2 < 0 Then Sum2 = 0 EndIf ' -------------------------- Обработка таймеров и вывод на экран, остаточное время, меньшего таймера If Sum1 > 0 Or Sum2 > 0 Then Mass[7] = $FF If Sum1 > Sum2 Then If Pr_2 = 1 Then ' Sum2 > 0 Then Mass[6] = $02 For X = 0 To 1 TmpVal1 = Sum2 Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X Else Mass[6] = $01 For X = 0 To 1 TmpVal1 = Sum1 Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X EndIf Else If Pr1 = 1 Then ' Sum1 > 0 Then Mass[6] = $01 For X = 0 To 1 TmpVal1 = Sum1 Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X Else Mass[6] = $02 For X = 0 To 1 TmpVal1 = Sum2 Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X EndIf EndIf EndIf If Mins > 59 Then Mins = 0 : Inc HRS ' Если прошло 60 минут If HRS > 23 Then HRS = 0 For X = 0 To 1 If X = 0 Then TmpVal1 = HRS Dig X GoSub Conv : Mass[1] = TmpVal Else TmpVal1 = HRS Dig X GoSub Conv : Mass[0] = TmpVal EndIf Next X For X = 0 To 1 If X = 0 Then TmpVal1 = Mins Dig X GoSub Conv : Mass[4] = TmpVal Else TmpVal1 = Mins Dig X GoSub Conv : Mass[3] = TmpVal EndIf Next X Return '-------------------------- Температура ----------------------------------------------------- Temper: OWrite Comm_Pin, 1, [$CC, $44] ORead Comm_Pin, 1, [Busy] ' If Busy = 0 Then Err OWrite Comm_Pin, 1, [$CC, $BE] ' Skip ROM search & read scratchpad memory ORead Comm_Pin, 2, [R_Temp.LowByte, R_Temp.HighByte] ' Read two bytes / end comms If R_Temp = 0 Then Mass[6] = 0 : Mass[7] = $FF : Mass[8] = $FF : Mass[9] = $FF : Return If Cold_Bit <> 1 Then Cel = R_Temp / 16 Mass[6] = $00 Mass[7] = $00 Else Cel_ot = 65535 - R_Temp Cel_ot = Cel_ot + 1 Cel = Cel_ot / 16 Mass[6] = $00 Mass[7] = $FF EndIf For X = 0 To 1 TmpVal1 = Cel Dig X GoSub Conv : TmpVal1 = 9 - X : Mass[TmpVal1] = TmpVal Next X Return '---------------------- Выводим на экран ----------------------------------------------------- Led: SHOut DataPin, ClockPin, MsbFirst, [Mass[0]\4, Mass[1]\4, Mass[2]\4, Mass[3]\4, Mass[4]\4, Mass[5]\4, Mass[6]\4, Mass[7]\4, Mass[8]\4, Mass[9]\4] DelayMS 200 Return '---------------------- Таблица преобразования для экрана ----------------------------------- Conv: TmpVal = LookUp TmpVal1, [$0A, $01, $02, $03, $04, $05, $06, $07, $08, $09] Return Архив с исходниками можно скачать здесь Похожие материалы:Динамическая индикация. Наглядный пример, ЧАСЫ НА PIC16F628 С ДАТОЙ И ДНЕМ НЕДЕЛИ
Японская компания Asahi производит различные типы подшипников https://katiks.ru/bearing-ucp206-asahi, известных своей надежностью и высоким качеством. Все технические характеристики подшипников можно посмотреть на сайте и выбрать для себя подходящие. | ||
| Просмотров: 14966 | Комментарии: 3 | | | ||
| Всего комментариев: 3 | |
|
| |
