|
Платформа стюарта (гексопод)
|
|
| tesla88 |
Дата: Вс, 13.01.2013, 14:14 | Сообщение # 1 |

Группа:
Проверенные
Ранг:
Продвинутый
Сообщений:
114
Замечания:
±
На сайте с 20.11.2010
Статус:
Offline
|
Всем дорого времени суток, возникла тут необходимость собрать гексопод на сервоприводах, под управлением программы с компа , но в силу своего уровня знания программирования даже не знаю с чего начать, необходимо каким то чудом увязать пик контроллер с компом по ком порту и, а ком порт в свою очередь должен получать команды от интерфейсной программы на компе. Может кто то уже делал подобное ? буду рад любой помощи.
|
|
|
|
| shaman |
Дата: Вс, 13.01.2013, 15:49 | Сообщение # 2 |

Группа:
Проверенные
Ранг:
Могу и подсказать
Сообщений:
178
Замечания:
±
На сайте с 07.11.2011
Статус:
Offline
|
День добрый , можна попробывать так, если Вам подходит
http://labkit.ru/html/autocontrol?id=136
http://pccontrol.bib.com.ua/doc1/dman01.html
http://habrahabr.ru/post/112511/
Сообщение отредактировал
shaman - Вс, 13.01.2013, 17:37
|
|
|
|
| tesla88 |
Дата: Пн, 21.01.2013, 08:09 | Сообщение # 3 |
|
Группа:
Проверенные
Ранг:
Продвинутый
Сообщений:
114
Замечания:
±
На сайте с 20.11.2010
Статус:
Offline
|
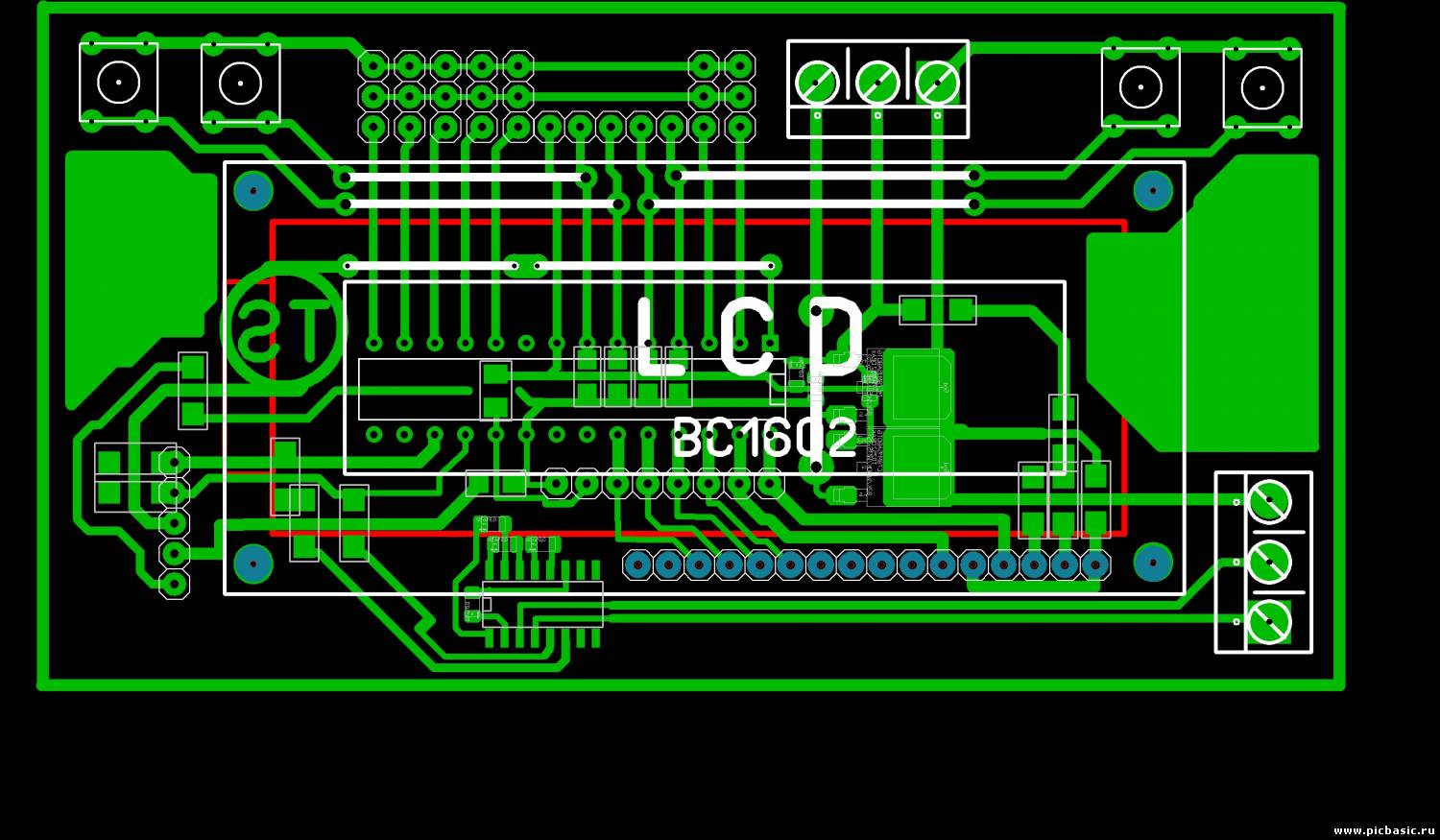
В общем сконструировал я плату для гексопода, а точнее трипода, на основе pic16f876a , , сделал три выхода под серво моторы( а точнее пять, два про запас) , два входа под джостик на основе двух реостатов, lcd ym1602, и поставил max232 для связи с компом. И всё бы хорошо, но что то с конфигурацией затупил немного, не знаю как отключить mclr и чтобы работал от внутренего генератора, а ещё на lcd отображать нечего не хочет, вот код на протоне, помогите словом добрым , да советом мудрым. 
Сообщение отредактировал
tesla88 - Пн, 21.01.2013, 10:30
|
|
|
|
| tesla88 |
Дата: Пт, 25.01.2013, 10:17 | Сообщение # 4 |
|
Группа:
Проверенные
Ранг:
Продвинутый
Сообщений:
114
Замечания:
±
На сайте с 20.11.2010
Статус:
Offline
|
В общем суть данного девайса заключается в следующем, это движущаяся платформа , в её основании стоят три сервомотора, платформа может управляться от джостика ( суть работы джостика основана на изменении сопротивления двух резисторов находящихся в двух осях) и от управляющей программы на пк. Есть действующий пример на Arduino (ATmega328)   и ссылка на сам источник http://habrahabr.ru/post/126026/ , там описана вся работа программы мк. и интерфейса, в силу своей безграмотности я пока не могу разобраться в данной программе, и поэтому решил собрать аналог на пике ( родном и проверенном). В данный момент я собрал свою плату на pic16f876a, для работы платформы я расчитал плату под 5-6 серво моторов, 2 переменных резистора, 4 кнопки, 1 жки 1602, и модуль usart на max232. ( фото девайса выложу чуть позже. Плату проверил по всем момента подключения ( все блоки исправны и работают) теперь осталось только дело за написанием самой управляющей программы. Если бы кто нибудь помог написать аналог программы ARDUINO для пика , то это была бы рабочая платформа, которую могли бы многие повторить , а по завершении можно создать готовый проэкт с подробным описанием и элюстрациями . Надеюсь на взаимопонимание и поддержку. и ссылка на сам источник http://habrahabr.ru/post/126026/ , там описана вся работа программы мк. и интерфейса, в силу своей безграмотности я пока не могу разобраться в данной программе, и поэтому решил собрать аналог на пике ( родном и проверенном). В данный момент я собрал свою плату на pic16f876a, для работы платформы я расчитал плату под 5-6 серво моторов, 2 переменных резистора, 4 кнопки, 1 жки 1602, и модуль usart на max232. ( фото девайса выложу чуть позже. Плату проверил по всем момента подключения ( все блоки исправны и работают) теперь осталось только дело за написанием самой управляющей программы. Если бы кто нибудь помог написать аналог программы ARDUINO для пика , то это была бы рабочая платформа, которую могли бы многие повторить , а по завершении можно создать готовый проэкт с подробным описанием и элюстрациями . Надеюсь на взаимопонимание и поддержку. 
Сообщение отредактировал
tesla88 - Пт, 25.01.2013, 10:27
|
|
|
|