|
Искуственный интелект и игрушечная машинка с наворотами
|
|
| DIKTATOR |
Дата: Ср, 20.05.2009, 00:57 | Сообщение # 1 |

Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
Собираюсь делать машинку(электронного друга) для своего кота Шурика, я уже делал ему на той же самой машинке 3года назад, но она умела только определять препятствие передней, сдать назад в определённую сторону и ехать дальше, ну там ещё были паузы для отдыха аккумулятора, мк PIC16F876A и К1128КТ4. Её задача была, вовремя моего отсутствия двигаться в разные стороны, ну чтобы шурик знал что он не один.
В этой модели будет использовано куча наворотов, планирую использовать PIC18LF4320-I/PT 44вывода 40мегагерц, стоит в вольтмастере 200рублей, его недостатки только корпус, остальные недостатки расскажете вы =). Программа будет сделана на языке PicBasicPro, повторюсь, я пишу программы в текстовом редакторе и компилирую через командную строку, например так: pbp -p16f877a progTSS.bas
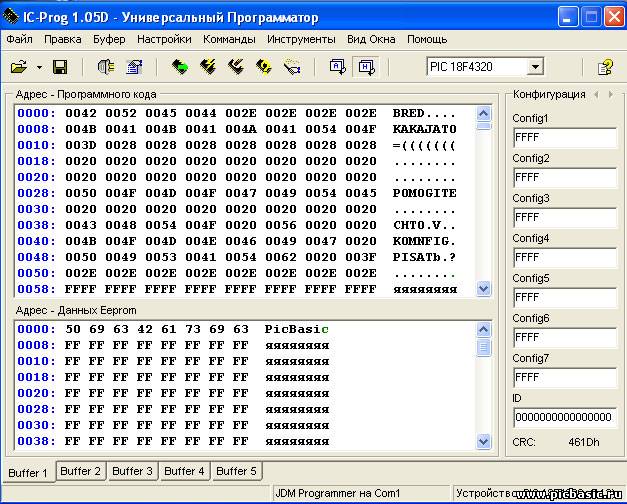
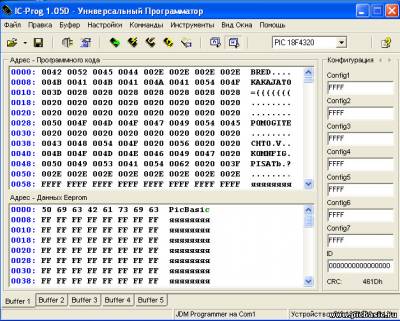
Программатор IC-Prog 1.05D, но там при выборе PIC18LF4320 уже совсем другое в поле конфигурация, там config1...config7 и что туда ставить? может какой другой программатор предложите? Раздельное питание для схем и для двигателей. питание:
2 регулятора напряжения LT1085 CT-5 (у меня их много, но я их НЕ ПОКУПАЛ, потомучто стоят 120рублей 0-о), пока 1 драйвер двигателя К1128КТ4(возможно будет ещё 1 такая микросхема для доп функций) возможно придётся отключать микросхему от питания полностью, аккумулятор Li-ion CGR-DU06 7.2V 640mAh это от видеокамеры панасоник NV-230GS(3ккд матриц, я её разбирал и выложил фотографии разбора в "контакты" http://vkontakte.ru/album36323838_92472733 ). Навороты:
запоминание препятствий их местонахождения и мягкость/твёрдость препятствия в EEPROM 64 или 512 килобайт, микрофон для отслеживания шумов(возможно будет использован другой, направленный и посаженный на крутящуюся башню с тахометром, для отслеживания направления шума), без контактный датчик препятствия(идей очень много вплоть до использования оптического датчика компьютерной мыши но как её подключить?? очень эфективно получится! так-как отслеживается движение/положение), возможно будет использоваться ПЛИС алтера/ксайлинкс/актел(ксайлинкс/актел есть в наличии, но нет програмы для их редактирования), датчик положения(требуется если не использовать оптический датчик мыши) тоже идей полно но реализовать сложновато, рычащий/мяукающий звук из динамика(ну это для забавы чтоб поразговаривали они очёмнибудь))
После того как всё будет сделано, машинка будет обмазана густой смесью состава: Эпоксидная смола 10частей + отвердитель 1.5частей + 0.10частей(очень примерно) униколлер чёрный(краситель)или 2части активированного угля + мука высший сорт 25частей(в качестве наполнителя). Эпоксидный клей марки ЭДП. Затем в определённой части корпуса будут выведены провода питания и провода из мк, это если понадобится подключение нового оборудования. Аккумулятор будет постоянно сниматься так-как камерой я пользуюсь постоянно, возможно я куплю запасной или 2 штуки, 1200-1400mAh мощности если такие существуют. В настоящий момент интересует подключение компьютерной мыши к PIC18LF4320 или к любому другому, что посоветуете, куда направите, ссылки?
Просто если получится использовать мышь, вся конструкция машины значительно упростится, а точность повысится в несколько раз и не понадобятся датчики препятствия/положение/движение, например когда машина обочтото упёрлась а сигнал вперёт/лево/право присутствует то мк узнаёт что машине чтото мешает и создаёт метку в ЕЕПРОМ о том что тут препятствие. Да! и ещё! если кот ударит машинку сильно, то никакие датчики кроме как оптического датчика миши не смогут определить скока см проехала машинка от удара.
В PIC18LF4320 40мегагерцовый генератор подключается както по особому или также пару конденсаторов с генератором и всё?
В итоге, если использование PIC18LF4320 будет жутко сложным, то могу сползти до PIC16 если производительность не пострадает. PIC18LF4320-I/PT.PDF 6мб лежит тут http://www.onlinedisk.ru/file/142961/
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Ср, 20.05.2009, 01:56
|
|
|
|
| DIKTATOR |
Дата: Ср, 20.05.2009, 01:57 | Сообщение # 2 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
Ну и главный виновник этих задумок, кот Шурик, претендент на клонов эйнштейна с вытянутым языком 

Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Ср, 20.05.2009, 03:02
|
|
|
|
| holyuser |
Дата: Ср, 20.05.2009, 02:52 | Сообщение # 3 |

Группа:
Проверенные
Ранг:
Могу и подсказать
Сообщений:
228
Замечания:
±
На сайте с 12.12.2007
Статус:
Offline
|
Quote (DIKTATOR) Ну и главный виновник этих задумок, кот Шурик
Фото главного виновника (Шурика) - в студию!!!
|
|
|
|
| DIKTATOR |
Дата: Ср, 20.05.2009, 03:01 | Сообщение # 4 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
ну вот ещё фотки тогда =)
 
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Ср, 20.05.2009, 03:21
|
|
|
|
| ADMIN |
Дата: Ср, 20.05.2009, 03:08 | Сообщение # 5 |

Администратор
Группа:
Администраторы
Ранг:
Специалист
Сообщений:
1082
Замечания:
±
На сайте с 20.08.2007
Статус:
Offline
|
Нехилая задачка
|
|
|
|
| DIKTATOR |
Дата: Ср, 20.05.2009, 03:15 | Сообщение # 6 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
щас вот думал насчёт запоминание препятствий их местонахождения и мягкость/твёрдость препятствия в EEPROM 64 или 512 килобайт будет мало, надо 256килобайт х 4 микросхемы.
и так пример:
каждый 1мм поверхности поля(квартиры) хранится в 1байте памяти, в 1байте хранится информация о препятствии "1" магкости "1" возможность перемещения "1" ну и датта записи "11111" итого 11111111 тоесть 8 бит.
адрес 1байта это и есть местоположение, но 256килобайт х 4 микросхемы немного затруднит расчёты. 1мм это очень крутая точность для машинки 15см длинной =))
возможно скачусь до 5мм , тоже нормальная точность, в итоге понадобится всего 256килобайт для 1 комнаты.
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Ср, 20.05.2009, 03:21
|
|
|
|
| DIKTATOR |
Дата: Пн, 01.06.2009, 23:57 | Сообщение # 7 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
Так я продолжил работу с машинкой. Использовать мышь мне видимо никак не получится, гогл мне не помог ((( клавиатуру ведь подключали значит и мышь тоже реально использовать.
Я думаю что мышь передаёт только координаты Х и У или скорость движения и направление, движение отслеживает сам датчик, например датчик сравнивает картинку с предыдущей и таким образом определяет в какую сторону и с какой скоростью перемещается мышь. Предположим что мышь передаёт данные с частотой 1000герц, и данные в размере 3 байта.
Грубый подсчёт производительности 40000000герц / 4 = 10000000 операций(если пик18 не сменил архитектуру) в сек, от 10милиона для обработки местоположения отведём 4милиона операций в сек, так как эта самая сложная часть программы и именно оптический датчик мыши направленный на пол является зрением электронного зверька, на интелект выделю 3 милиона операций в сек, на остальные датчики 3 милиона. А датчики будут такие: Датчик магнитного поля(если электронный зверёк голоден искать источник магнитного поля и ждать там,) он позволит дать знать мне о том что зверёк хочет кушать  , ,
датчик шума(поиск источника шума проводится рандомно(искать или нет) также влияет были ли шумы вообще(если в комноте много людей то поиск не будет ни при каких условиях), если поиск активирован то следовать за шумом) микрофон расположен на крутящемся диске с датчиком положения(обработка будет делаться микросхемой ПЛИС, в мк будут отправляться данные о направлении и силе/характере шума), датчик света(день или ночь) а также определяет что на машинке чтото лишнее(тут срабатывает интелект: определить какой тяжести предмет, если слишком тяжолый машинка издаёт звук и прекращает любые движения). Сори что так запутано , надеюсь поймёте, ктомуже это не всё что я хочу сделать.
Жду от вас советы о PIC18LF4320 44TQFP, обнаружил его большой недостаток , это 4килослов памяти  , но могу выбрать другой главное чтоб успел обработать всё что требуется. , но могу выбрать другой главное чтоб успел обработать всё что требуется.
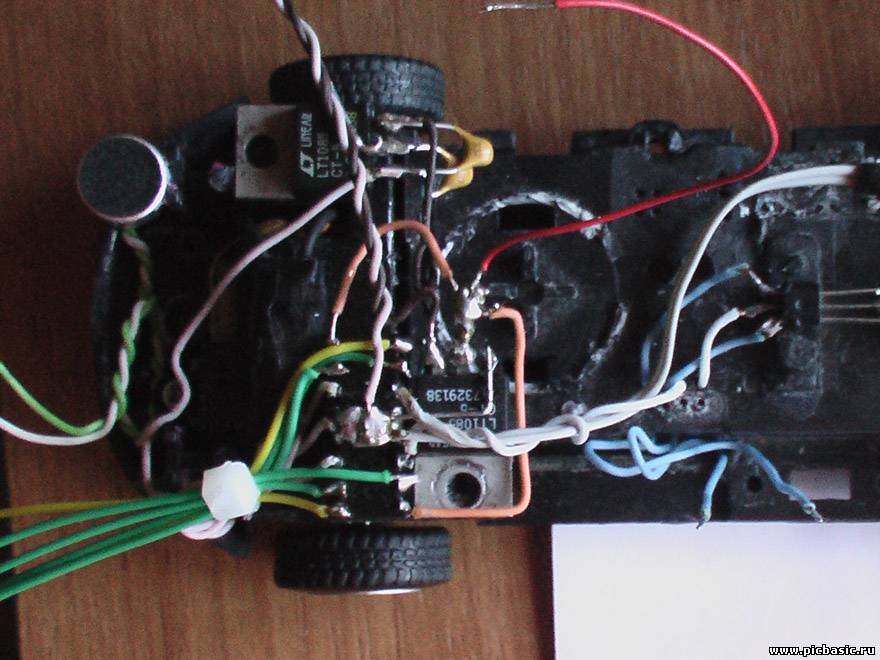
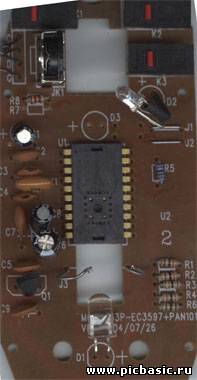
Вот что сделал за несколько часов. Через 14 часов выложу фотки засохшего клея(состав: смола10частей отвердитель1,5частей крахмал20частей капля красителя) . На первой фотке установлены микросхемы к1028кт4 и 2 регулятора напряжения по 5 вольт. Датчик микрофон неподвижный(возможно я его сниму, так как его заменит подвижный датчик шума) 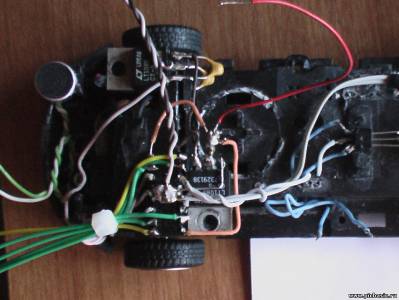  
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Вт, 02.06.2009, 11:29
|
|
|
|
| MasterPic |
Дата: Чт, 11.06.2009, 20:33 | Сообщение # 8 |

Группа:
Проверенные
Ранг:
Могу и подсказать
Сообщений:
186
Замечания:
±
На сайте с 22.11.2008
Статус:
Offline
|
Как успехи, DIKTATOR? Неплохая тема для статей. Добавлено (11.06.2009, 20.33.34)
---------------------------------------------
Quote Использовать мышь мне видимо никак не получится, гогл мне не помог ((( клавиатуру ведь подключали значит и мышь тоже реально использовать.
Я думаю что мышь передаёт только координаты Х и У или скорость движения и направление, движение отслеживает сам датчик, например датчик сравнивает картинку с предыдущей и таким образом определяет в какую сторону и с какой скоростью перемещается мышь.
А поиск по микрухе, которая стоит в мыше, не помог? Вернее даташита?
|
|
|
|
| DAlexV |
Дата: Чт, 11.06.2009, 23:00 | Сообщение # 9 |

Группа:
Проверенные
Ранг:
Разобрался
Сообщений:
655
Замечания:
±
На сайте с 13.05.2008
Статус:
Offline
|
Quote (DIKTATOR) Использовать мышь мне видимо никак не получится
О мышах:
http://www.ixbt.com/peripheral/mice-sensor.shtml
http://o-d-v.nm.ru/optical_mouse/index.htm Причем в последний ссылке есть даже схема и возможность делать снимки с сеносора, но незнаю  , лежат две мыши но пока руки не дошли, добился только лишь премещения курсора(4 выхода работают по принципу энкодера но не более) если у кого срастется, поделитесь впечатлениями. , лежат две мыши но пока руки не дошли, добился только лишь премещения курсора(4 выхода работают по принципу энкодера но не более) если у кого срастется, поделитесь впечатлениями. 
Будьте оригинальны-не повторяйте чужих ошибок ! Рыба сдохла. Теперь STM32(TS)+C#(VS).Старею :)
Сообщение отредактировал
DAlexV - Чт, 11.06.2009, 23:00
|
|
|
|
| Prototup |
Дата: Сб, 13.06.2009, 18:42 | Сообщение # 10 |

Группа:
Пользователи
Ранг:
Начал соображать
Сообщений:
24
Замечания:
±
На сайте с 09.11.2008
Статус:
Offline
|
Кот конечно этого стоит! А может быть стоит подумать по поводу не оптической мышки, а мышки с "яйцами" или снабдить ультразвуковым датчиком и по безопасному расстоянию от препятствий составить в памяти карту квартиры, путём самосовершенствования, занося апостариорные данные в EERPROM? На самом деле мне кажется что это ещё не всё, что будет если переставишь стул или холодильник на другое место? Надо переходить к искусственному интеллекту. (шутка!). Задачка интересная! И ещё, для меньших затрат памяти и возрастания быстродействия - поставь в квартире реперные точки и будет система типа ГЛОНАС или GPRS!
Сообщение отредактировал
Prototup - Сб, 13.06.2009, 18:46
|
|
|
|
| DIKTATOR |
Дата: Вс, 14.06.2009, 23:08 | Сообщение # 11 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
Quote А поиск по микрухе, которая стоит в мыше, не помог? Вернее даташита?
Интернет мне подарили в 18 лет, так-что не ругайте )
спасибо за ссылки, подтвердились мои догадки) Quote поставь в квартире реперные точки и будет система типа ГЛОНАС или GPRS!
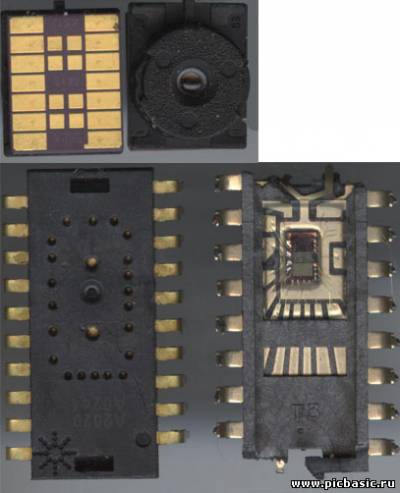
Всё это радиоволны, и много потреблять ток будет, кроме датчика мыши ничего лучше в голову не лезит, пол скользкий... Теперь надо разобраться с мк мыши, у меня есть 2 платы с датчиком и мк.
Левая плата подключается к порту мыши, правая плата к usb.
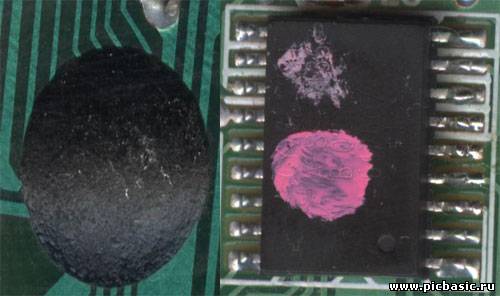
а вот сами мк, правый для юсби(первая строчка CY7C6323J, надписи почти не видны).
 И два датчика без плат, для сравнения вверху 2 камеры от мобильных телефонов.
 Теперь я спустился с небес и планирую всё делать на PIC16F877A, и всёравно я не уверен что он осилит это.
А пересесть на PIC16 заставила такая непонятная конфигурация. В поле конфигурация чтото мне незнакомое.
 По поводу датчика шума, чтоб не городить огород можно попробывать использовать несколько микрофонов, точность многократно возрастёт(машинка без звука вообще при сканировании).
Чертить схемы для плис(если они потребуются) я умею в quartusII, но в практике наверняка могут вопросы возникнуть.
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Пн, 15.06.2009, 17:20
|
|
|
|
| DIKTATOR |
Дата: Пн, 15.06.2009, 17:36 | Сообщение # 12 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
Итак заострив зрение и лупу прочитал надпись CY7C63231 A-SC.
Нашёл даташит для CY7C63231 A-SC смотрите на сайте http://www.datasheetarchive.com/search.php?q=CY7C63231 , нда гугл норм чувак ...
А также я прикрепил сжатый фаил. Я вот так досихпор и не понял, варианты:
1.сам датчик передаёт снимки 18х18(например) в мк CY7C63231(он обрабатывает картинку) а затем мк передаёт данные - скорость/направление
2.датчик передаёт и изображение и скорость/направление
3.датчик передаёт снимки 18х18(например) в мк CY7C63231 а затем мк перерабатывает данные чтоб они передались в пк а сам пк обрабатывает картинки для выяснения направления/движения курсорса
4.датчик передаёт данные скорость/направление в мк CY7C63231 затем мк перерабатывает данные чтоб они передались в пк - пк получает данные скорость/направление Какой из этих вариантов верный ? для меня самый выгодный вариант это 4, так как датчик можно подключить прямо в мозг(pic16f877a) машинки.
Но тогда как из мыши получают изображение? выходит что будет самый отвратительный 3 вариант. Но если посмотреть http://o-d-v.nm.ru/optical_mouse/index.htm то там видно что датчик подключен к пк в обход мк, следовательно вариант 1. Если вариант 1, то теоретически сделать свой обработчик изображения легко , можно использовать отдельный pic16 или сделать на плис.
Но при любых обстоятельствах мозг машины должен получать только данные скорость/направление.
Тут датчик с названием pan101b, а тут http://www.datasheetarchive.com/search.php?q=pan101b даташит.
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
Сообщение отредактировал
DIKTATOR - Пн, 15.06.2009, 19:00
|
|
|
|
| DAlexV |
Дата: Вт, 16.06.2009, 00:33 | Сообщение # 13 |
|
Группа:
Проверенные
Ранг:
Разобрался
Сообщений:
655
Замечания:
±
На сайте с 13.05.2008
Статус:
Offline
|
Quote (DIKTATOR) Я вот так досихпор и не понял http://forum.roboclub.ru/IPBoard....id=1536

Будьте оригинальны-не повторяйте чужих ошибок ! Рыба сдохла. Теперь STM32(TS)+C#(VS).Старею :)
|
|
|
|
| Prototup |
Дата: Ср, 17.06.2009, 00:42 | Сообщение # 14 |

Группа:
Пользователи
Ранг:
Начал соображать
Сообщений:
24
Замечания:
±
На сайте с 09.11.2008
Статус:
Offline
|
Придумка - бредумка! Что-то совсем забыли про автомобильные узконаправленные ультрасоники. Полезным может так-же оказаться и эффект терменвокса. А на счёт датчиков скорости и направления можно приспособить энкодеры с кодом Грея, например. Я такие на Митьке видел неоднократно. Мужик продаёт прямо из пачки, на крытом причале для автомобилей сзади рынка, мне они как-то незачем были и скоко стоит тоже не знаю.
|
|
|
|
| DIKTATOR |
Дата: Чт, 14.01.2010, 00:12 | Сообщение # 15 |
|
Группа:
Проверенные
Ранг:
Понимаю
Сообщений:
76
Замечания:
±
На сайте с 24.07.2008
Статус:
Offline
|
К коллекции добавился оптический датчик PAW3401.
3000 frames/sec
400/800/1000 CPI
Interface PS/2
High speed motion detection up to 28inches/sec
12 mA @Mouse moving (Normal)
5 mA @Mouse not moving (Sleep) Оптические датчики с интерфейсом USB я думаю не подходят, использовать в машинке буду МК не выше PIC16F876A SO28, частота 20мегагерц. По поводу ультрасоников и других датчиков, машинка всегда будет ездить по плоской поверхности, материал пола - паркет, никакие другие средства не позволят выдавать такую огромную точность перемещения машинки, оптический датчик является самым главным органом чувств машинки, благодаря которому ненужны другие датчики: безотказное определение направление движения, местоположение опираясь на раннее пройденных участках, полный контроль препятствий в радиусе 360 градусов вокруг машины(если машина столкнётся с чем-то то мк это поймёт потому что двигатель включен а судя по датчику машина стоит на месте), определять тяжесть предмета(можно ли его убрать с траектории, если нет то записать в память что это не перемещаемый объект). Работу над машинкой веду очень медленно, потому что есть другие дела.
Хотя бы даю направление другим, вдруг кого заинтересует =). Идеи не плохие и не такие сложные, просто нужно время и знание как работать с интерфейсом PS/2. http://www.networktechinc.com/ps2-prots.html
http://www.burtonsys.com/ps2_chapweske.htm
http://www.computer-engineering.org/ps2mouse
Используйте симулятор ПРОТУЕС !!! Реальная вещь!!
Я снова тут, но не всегда свободен.
|
|
|
|